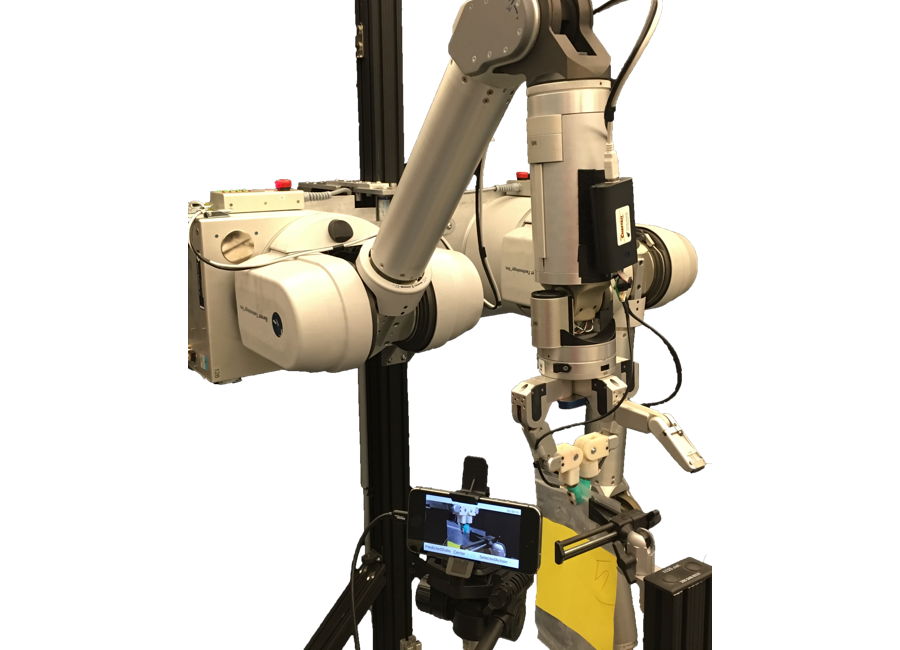
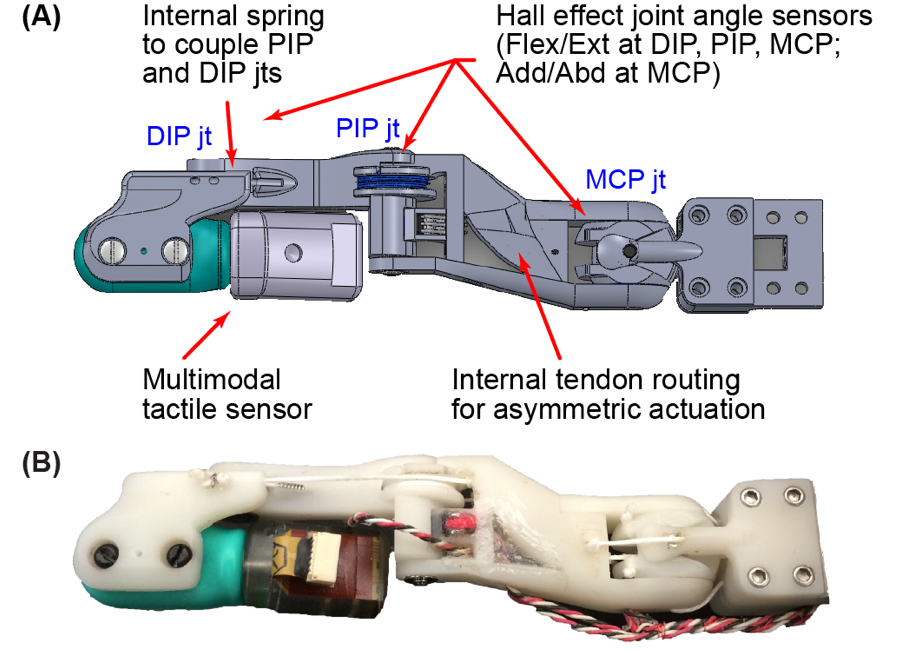
The BairClaw is a highly sensorized, multi-articulating, anthropomorphic robot hand testbed with rich proprioceptive and tactile sensing capabilities. The BairClaw was originally conceived for the advancement of artificial grasp, manipulation, and haptic exploration. The system could also be used for the neurorehabilitation of somatosensory disorders due to upper limb impairment or loss.
Hellman, R.B., Chang, E., Tanner, J., Helms Tillery, S.I., and Santos, V.J. “A robot hand testbed designed for enhancing embodiment and functional neurorehabilitation of body schema in subjects with upper limb impairment or loss.” Frontiers of Human Neuroscience. 2015:9(26). doi:10.3389/fnhum.2015.00026. PDF
Hellman, R.B., Chang, E., Tanner, J., Helms Tillery, S.I., and Santos, V.J., “A robot hand testbed for enhancing embodiment and functional neurorehabilitation of body scheme in upper limb amputees.” Myoelectric Controls Symposium, New Brunswick, Canada, Aug. 18-22, 2014.
Hellman, R.B., Chang, E., and Santos, V.J. “Tendon-driven testbed for haptic exploration and sensory event- driven grasp and manipulation.” IEEE Haptics Symposium, Houston, TX, Feb. 23-26, 2014, Hardware demonstration D78.
Date:
April 2011 - Present
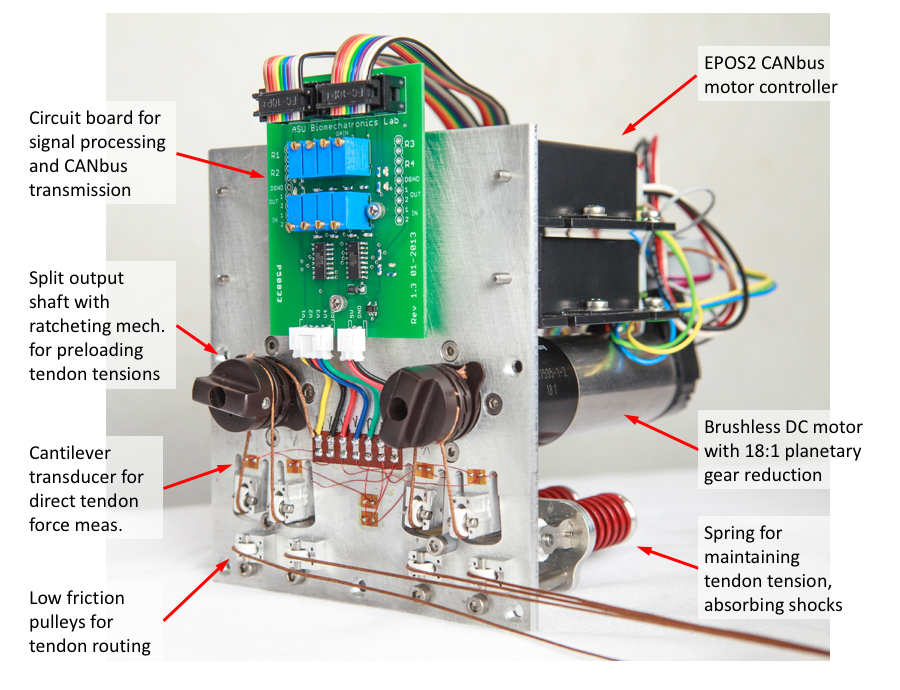
Actuation System R2
Objective: To design a rotary motor-based actuation system for tendon-driven robotic hands with the following design criteria:
Ability to actuate remotely a tendon-driven hand that can meet or exceed the speed and strength of human fingertips
Ability for high precision control of tendon displacement or force
Ability to preload and maintain tendon tension
Ability to measure tendon tension directly
Backdriveability and low backlash
Modularity for a double-acting actuation scheme (“N-type”) with “push-pull” capabilities or a single-acting actuation scheme (“2N-type”) of N joints
Hellman, R.B., Chang, E., Tanner, J., Helms Tillery, S.I., and Santos, V.J. “Tendon-driven testbed for haptic exploration and sensory event-driven grasp and manipulation.” Piper Health Solutions Workshop on Rehabilitation Robotics, Tempe, AZ, Feb. 28 - Mar. 1, 2014.
Hellman, R.B., Chang, E., Tanner, J., Helms Tillery, S.I., and Santos, V.J. “Tendon-driven testbed for haptic exploration and sensory event-driven grasp and manipulation.” DARPA MTO Sensorimotor Prosthetics Workshop, Scottsdale, AZ, Feb. 13, 2014.
Hellman, R.B. and Santos, V.J. “Design of a remote actuation module with self-contained, direct tendon force sensing for artificial hands,” Piper Health Solutions Workshop on Rehabilitation Robotics, Tempe, AZ, Feb. 22-23, 2013.
Patent Application
Santos, V.J. and Hellman, R.B. “Systems and methods for tendon-driven robotic mechanisms.” International Patent App. No. PCT/US13/63249, Oct. 3, 2013; U.S. Patent App. No. 14/676,658, April 1, 2015
Date:
April 2011 - Present
Actuation System R1
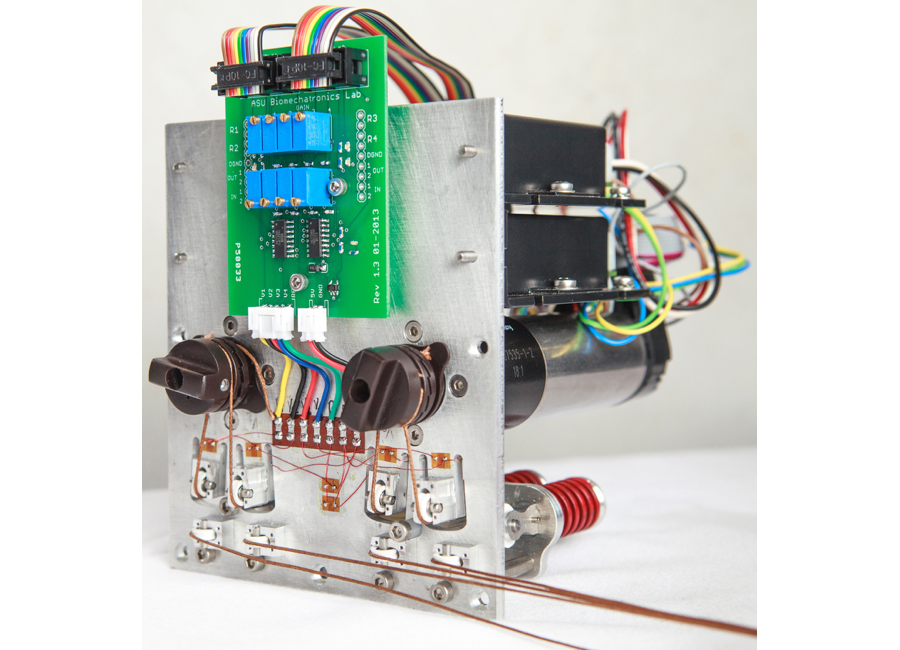
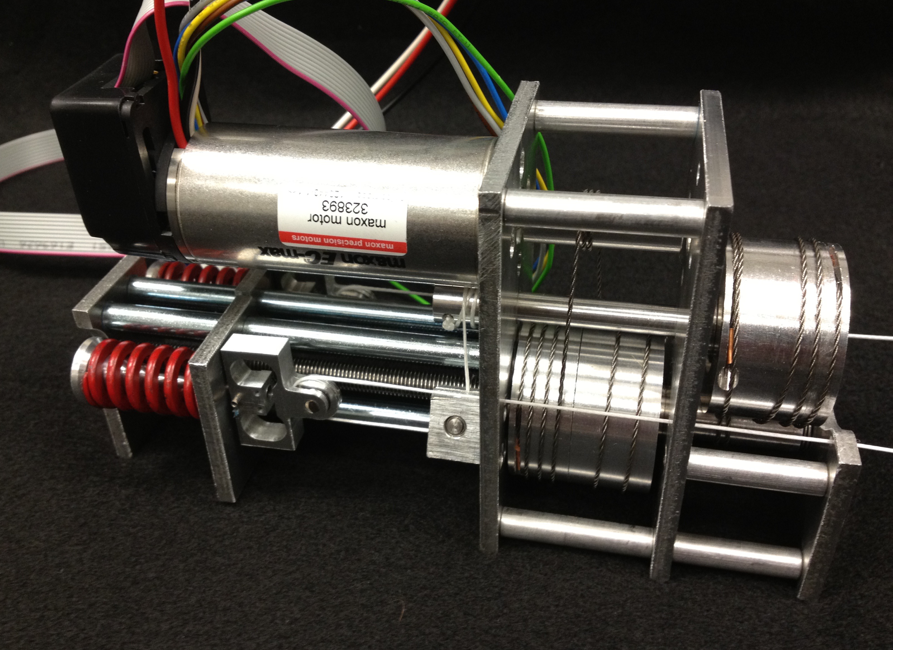
Abstract - This paper presents a novel design of a rotary motor-based actuation system for tendon-driven robotic hands. The system features a two-stage, zero backlash, pretensioned pulley reduction that enables high precision control of tendon displacement and force, as well as back-driveability of the motor. While the modular actuation system can be used to actuate any tendon-driven mechanism, the system is designed to meet or exceed the speed and strength of human fingertips. The system can be duplicated for use in a single-acting actuation scheme (“2N-type”) of N joints, but was designed specifically for a double-acting actuation scheme (“N-type”) with “push-pull” capabilities. In the former case, one motor is used for each rotation direction of a single revolute joint. In the latter case, one motor can control both directions of the joint, thereby reducing hardware needs and control complexity. To address the challenges of tendon slack in the flexible-link transmission to the robot hand, the system includes a lead screw mechanism for setting a tension preload and springs for maintaining tension during the course of use. An integrated uniaxial load cell allows for monitoring of tendon tension and calculation of finger joint torques.
Hellman, R.B., and Santos, V.J. “Design of a back-driveable actuation system for modular control of tendon- driven robot hands.” Proc IEEE RAS/EMBS Intl Conf on Biomedical Robotics and Biomechatronics, Roma, Italy, June 24-27, 2012. Podium.
Functional Contour-following via Haptic Perception and Reinforcement Learning
Date:
January 2015 - Present
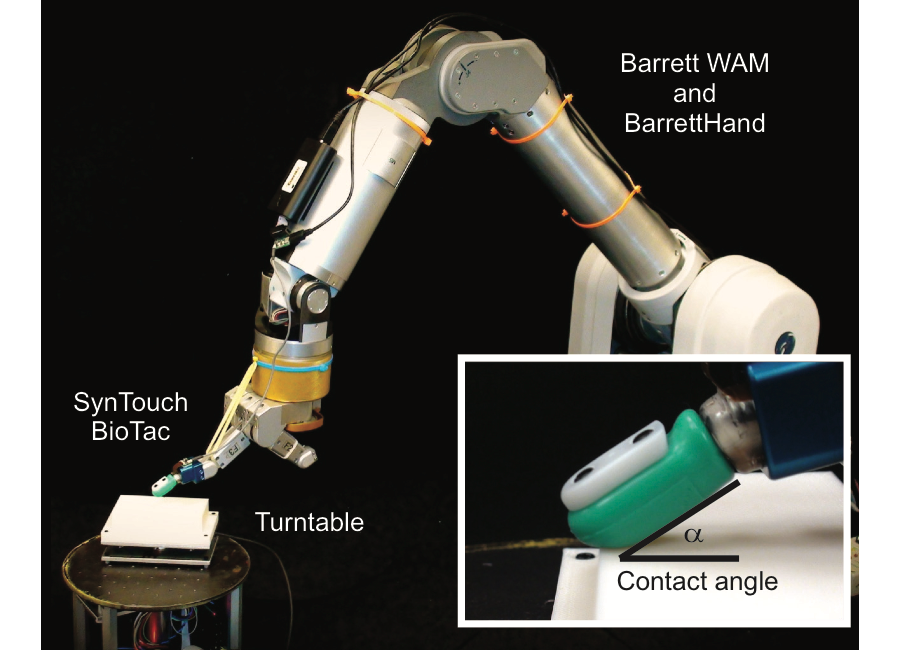
Haptic Exploration and Edge Perception
Abstract— Upper-limb amputees rely primarily on visual feedback when using their prostheses to interact with others or objects in their environment. A constant reliance upon visual feedback can be mentally exhausting and does not suffice for many activities when line- of-sight is unavailable. Upper-limb amputees could greatly benefit from the ability to perceive edges, one of the most salient features of 3D shape, through touch alone. We present an approach for estimating edge orientation with respect to an artificial fingertip through haptic exploration using a multimodal tactile sensor on a robot hand. Key parameters from the tactile signals for each of four exploratory procedures were used as inputs to a support vector regression model. Edge orientation angles ranging from 90 to 90 degrees were estimated with an 85-input model having an R2 of 0.99 and RMS error of 5.08 degree. Electrode impedance signals provided the most useful inputs by encoding spatially asymmetric skin deformation across the entire fingertip. Interestingly, sensor regions that were not in direct contact with the stimulus provided particularly useful information. Methods described here could pave the way for semi- autonomous capabilities in prosthetic or robotic hands during haptic exploration, especially when visual feedback is unavailable.
Ponce Wong, R.D., Hellman, R.B., and Santos, V.J. “Spatial asymmetry in tactile sensor skin deformation aids perception of edge orientation during haptic exploration.” IEEE Transactions on Haptics in March 2014. Special Issue on “Haptics in Rehabilitation and Neural Engineering,” 2014:7(2):191–202.
Date:
August 2013
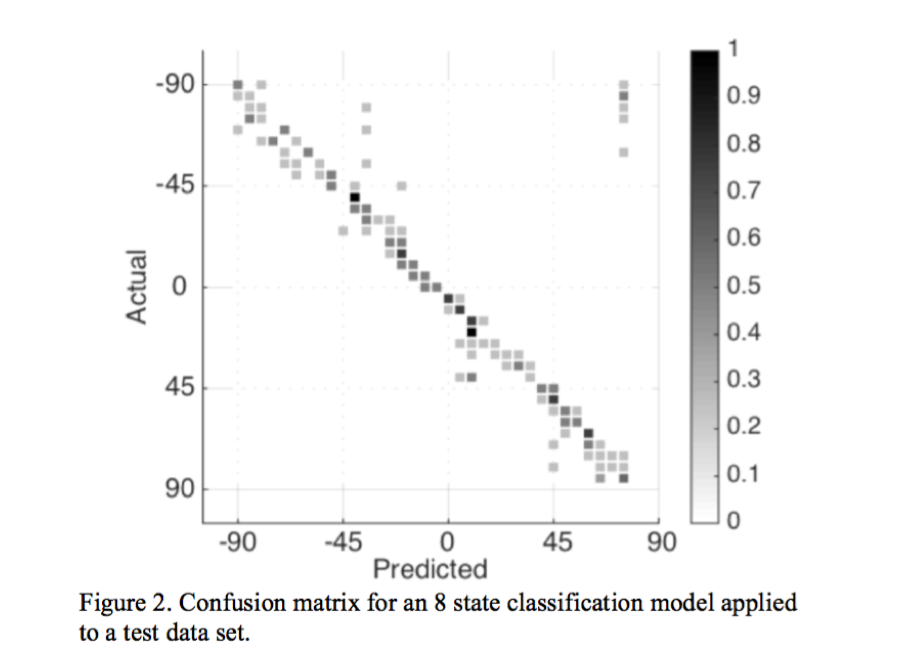
Real-time haptic perception
Abstract— Real-time haptic perception of objects and their salient geometric features remains a grand challenge for robotics. In this work, probabilistic modeling techniques, widely used for speech recognition, were applied to multimodal tactile sensor data from the haptic exploration of edges. Hidden Markov Models were used to build classifiers to perceive edge orientation with respect to the body-fixed reference frame of an artificial fingertip in real-time. The classifiers required essentially no post-processing of the tactile data, and were robust to differences in fingertip speeds and contact pressures. Preliminary results constitute a promising first step toward real-time decision-making based on haptic perception.
Hellman, R.B. and Santos, V.J., “Development of probabilistic models for real-time perception of geometric features with a sensorized artificial finger.” Workshop on “Robotic Hands, Grasping and Manipulation,” IEEE/RAS Intl Conf on Robotics and Automation, Seattle, WA, May 30, 2015. PDF
Date:
May 2015
Lego Star Wars
Here are some pictures from the build
Woodworking
Drone crash
I have many successful flight videos but I like this one because of how lucky I was to find it after the crash and how minimal the damage was. This is also a good example of what happens when an ESC fails. To be fair to the ESC I may not have mounted it in the best location. A screw on one of the arms ended up melting through the heatshrink and blowing a small cap.
Hangar Mate
1st Place Malott Innovation Award Purdue Mechanical Engineering 2008
Hangar Mate was my 2008 senior design project at Purdue University. I served as team leader for the group. We were comprised of four senior mechanical engineers. Hangar Mate successfully designed and built a tow device capable of maneuvering a small aircraft until the plane could taxi on its own. The team designed and built Hangar Mate in a singe semester.
Quadcopter
Quadcopter running with 2-axis gimbal and all the bells and whistles
Below is a custom built travel case. The case was initally designed for a tripod. I used thermoplasic and foam instert to stabalize the quadcopter during travel and compartments inside of the case allow for additional storage of batteries, props, and tools.
His hatred of all things that beep is cute but also very challening when working with just about anything.
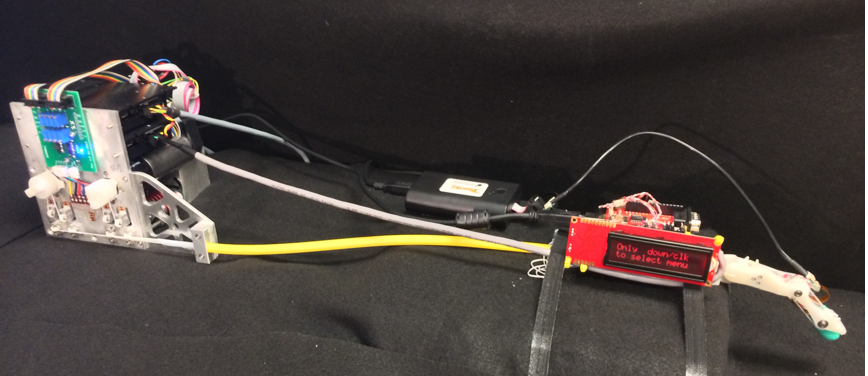
WAM Remote
Outreach is a critical part of the work done in the UCLA Biomechatronics Lab. We host a wide range of students from k-12 and I try to get them all excited about science and engineering. Much of what we do is controled through code so I wanted to design and build a way for k-12 students to interact with and control our robotic systems. I built a custom iOS app that allows for easy control and demonstration of both robots simultaneously.